Crowds Evacuation for Heterogeneous Agent
This project simulated crowds evacuation with different conditions and scenarios. A* algorithm and Optimal reciprocal collision avoidance were used as a navigation and collision avoidance methods.
Publication link
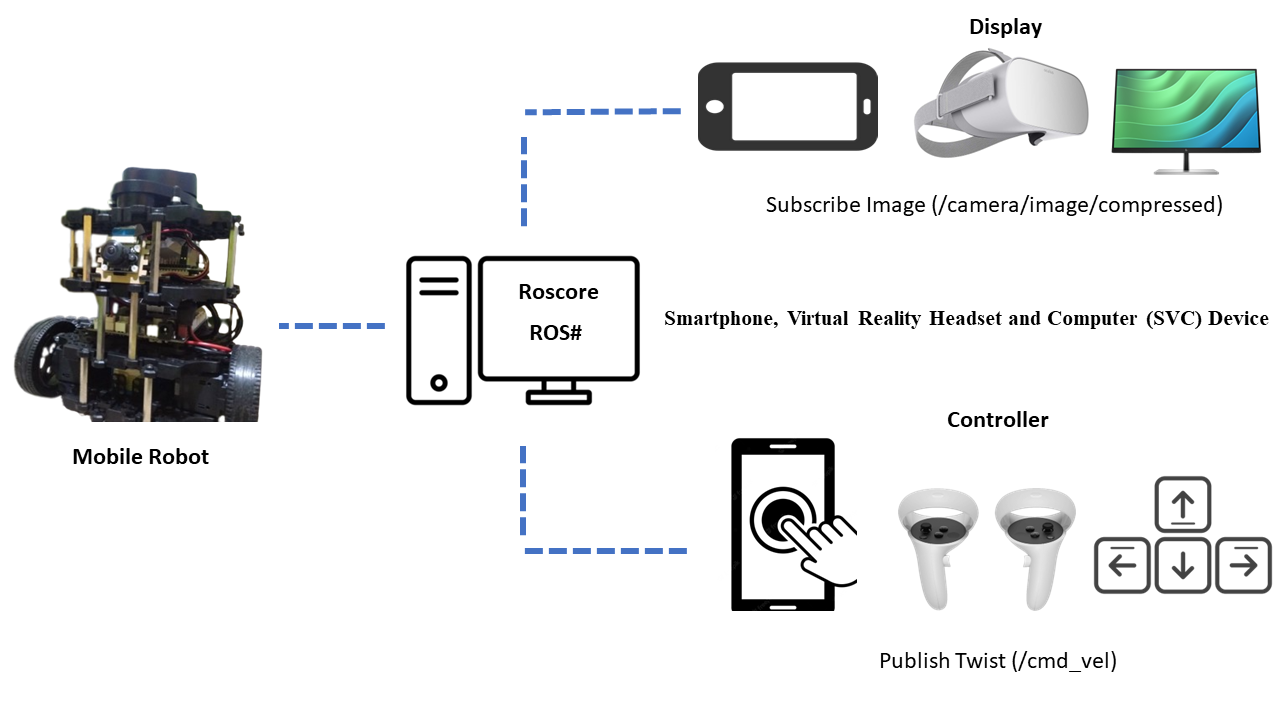
Mobile Robot Teleoperation using Multi Devices
This project creates teleoperation for mobile robot using multi devices like virtual reality, mobile phone and computer. A camera was used as a visual sensor that dispatched the information of the surroundings to each platform. The controller was depended by the platform.